Как управлять марсоходом
Содержание
Как управлять марсоходом
Немногим более года назад мне повезло: я стал частью команды ученых и инженеров, ответственной за управление марсоходом «Кьюриосити». С тех пор я узнал МНОГО нового о марсоходах. Но еще больше только предстоит узнать. «Спирит», «Оппортьюнити», «Кьюриосити» и «Персеверанс» — одни из самых сложных и в то же время надежных роботов, когда-либо созданных человеком. В то же время инструменты и методы, которые применяются для управления марсоходами, достаточно просты в освоении и доступны пониманию. И это хорошо, поскольку 18 февраля «Персерванс» опустится на поверхность Марса, после чего его отправят на изучение планеты. Сейчас моя задача — рассказать о том, как управлять марсоходом. Когда новый ровер прилетит на Марс, вы уже будете понимать, что происходит и как все это работает.
Большая часть этой статьи — изложение моего опыта управления «Кьюриосити». Имейте в виду, что «Спирит» и «Оппортьюнити» во многом похожи в этом плане на своего «наследника». Для управления «Персерванс» будут использоваться те же технологии и методы, так что слишком значительных отличий нет.
Основы
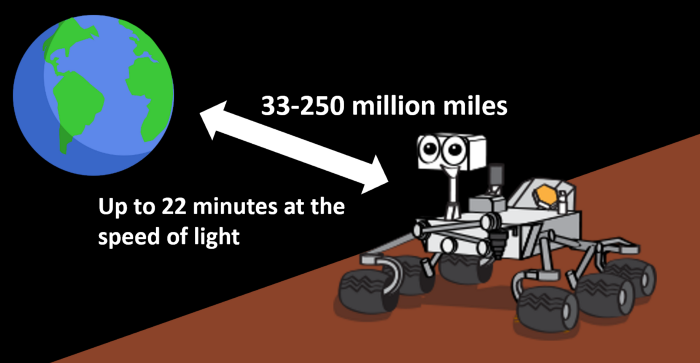
Главное, что нужно знать, — Марс от нас очень, очень далеко. Радиосигнал, отправленный с Земли, достигает поверхности Марса через 22 минуты. Поэтому управление в режиме реального времени — не вариант. Кроме того, «Кьюриосити» получает информацию с Земли раз в день. Все остальное время он предоставлен сам себе. При этом о какой-либо автономности речь не идет: у марсохода ограниченный набор действий, которые он может выполнять самостоятельно. Большая часть того, что делает ровер, запланировано и прописано в памяти устройства еще на Земле.
Конечно, есть и парочка исключений: некоторые проблемы марсоход должен уметь решать самостоятельно. Но большинство таких решений» — остановка и ожидание инструкций с Земли в ответ на какой-либо внешний фактор. Определенной степенью автономности обладает Aegis — система, которая может самостоятельно выбрать кусок породы, в который «Кьюриосити» должен «выстрелить» лазером.
Смотри под ноги
Главная задача оператора ровера — обеспечить его безопасность на протяжении всего пути на Марсе. Поэтому надо тщательно оценивать все возможные варианты своих действий. У марсоходов НАСА есть несколько камер, благодаря которым ровер формирует «картинку», как бы увиденную глазами человека. Есть также hazcams, «камеры опасности», которые оценивают наличие проблем поблизости, а также navcams — навигационные камеры, оценивающие дорогу впереди. Есть еще и другие камеры, которые, правда, по большей части используются для выполнения научных задач, поэтому я воздержусь от описания принципа их работы.

В большинстве случаев для визуальной оценки участка пути ровера используются как раз navcams. Изображения, получаемые ими, можно посмотреть в качестве объемной «картинки» на Земле. В НАСА разработали специализированное ПО, которое предназначено для визуализации окружающей ровер местности и для создания виртуальной модели ровера и участка ландшафта вокруг него. Эта виртуальная модель используется для тестирования планируемых операторами действий. Если эмуляция прошла хорошо, команды можно отправлять на Марс. Таким образом, ученые избавляют себя от возможных негативных последствий отправки непроверенной команды.
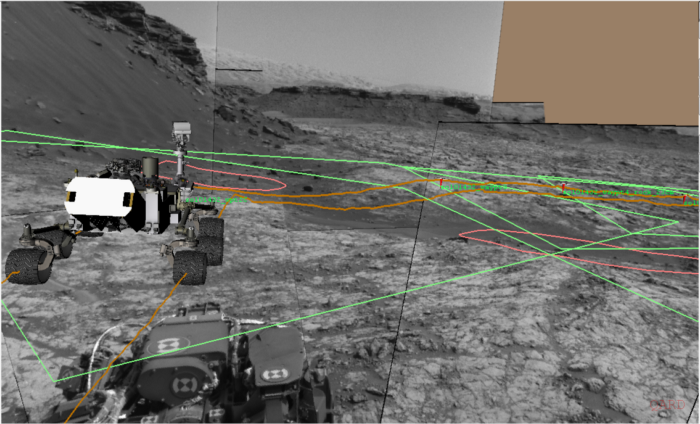
Вот как выглядит эмуляция движения ровера после того, как модель полностью готова. Серые области — участок Марса, по которому роверу предстоит проехать в ближайшем будущем. Оранжево-коричневые линии — это, собственно, путь ровера. В день моделируется около 30 метров поверхности, камеры просто не могут собрать больше информации, поэтому марсоход проезжает именно столько.
А вот наложение смоделированного пути ровера на реальные снимки, полученные навигационными камерами.
При планировании движения марсохода нужно учитывать несколько важных моментов. Например, размер объектов, встречающихся по пути. Максимальный размер, с которым может справиться ровер, — около 50 см. Все, что больше, нужно обогнуть. Песок (это не совсем песок, но будем называть его так) тоже желательно огибать: если его много, ровер может застрять. Даже небольшие куски породы представляют собой опасность, так как их острые края повреждают колеса ровера.
Быстро, не очень или медленно?
После того как ученые определились с направлением движения, нужно понять, как именно двигаться. Есть три режима: слепой режим, визуальная одометрия и autonav.
Слепой режим — самый простой способ движения из возможных. Марсоход в этом случае будет следовать инструкциям, присланным с Земли, и не обращать ни на что внимания. В идеале это отличный метод управления марсоходом, но условия на Марсе далеки от идеала. Зачастую внешние факторы влияют на продвижение к цели. Это может быть, например, скольжение колес по поверхности, так что марсоход вместо того, чтобы продвинуться на 10 метров, продвигается на 9 или даже 5.
Отличный способ понять, что такое слепое управление, — закрыть глаза и попробовать пройти по определенной траектории. Например, 7 метров вперед, затем повернуть на 30 градусов налево и пройти еще 4 метра. Мы в этом случае вообще не представляем, что происходит вокруг, и не адаптируемся к меняющимся условиям.
В целом, слепое управление — не лучший вариант, но он позволяет марсоходу двигаться быстро, поскольку системе не нужно останавливаться для того, чтобы сделать снимки. На максимальной скорости марсоход может проехать на длину футбольного поля всего за час. Но этот вариант выбирается только в том случае, если вокруг нет потенциально опасных объектов.
Визуальная одометрия применяется операторами чаще. В этом случае марсоход останавливается через каждый метр для того, чтобы сделать снимок грунта камерами. Бортовой компьютер затем оценивает изображение, сравнивает его с предыдущим и пытается понять, что изменилось вокруг, включая местоположение марсохода. Затем компьютер отправляет новые навигационные команды, позволяющие держаться запланированного пути.
Этот способ похож на предыдущий, только в процессе продвижения каждые пару шагов нужно останавливаться, чтобы открыть глаза и оглядеться.
Визуальная одометрия — баланс между скоростью и точностью движения. Метод крайне важен, поскольку помогает обнаружить препятствия на пути ровера и избежать их.
Автонавигация, или autonav, — наиболее технологически совершенный метод. Его можно сравнить с использованием беспилотника в автомобиле. Задаем общую цель и ровер сам ищет безопасный и быстрый путь к цели. Марсоходу приходится останавливаться через каждый метр, чтобы оценить обстановку при помощи камер. Но вместо того, чтобы сделать один снимок при помощи навигационных камер, марсоход задействует и hazcams. Затем бортовой компьютер объединяет всю эту информацию, формируя «карту опасности». Проблемные места отмечены красным цветом, места, где ситуация не столь плачевна, — желтым, а максимально подходящая для продвижения роутера местность отмечается зеленым цветом.

Это самый медленный вариант продвижения для марсохода. Если в идеальной ситуации ровер может пройти на длину футбольного поля при помощи слепого метода, как говорилось выше (это примерно 100 м), то в случае автономного режима в идеальных условиях марсоход пройдет всего 30 метров.
При этом ровер не умеет обнаруживать песок или острые камни, так что метод используют только тогда, когда местность абсолютно безопасна.
Чего можно ждать от «Персеверанс»?
НАСА ожидает, что новый марсоход опустится на поверхность планеты уже 18 февраля. После этого, надеюсь, он начнет продвижение по Марсу. Все, о чем я говорил выше, относится и к новому марсоходу, но у него больше возможностей. Например, он сможет двигаться минимум в два раза быстрее «Кьюриосити»: у бортового ПК больше вычислительных ресурсов и улучшенные алгоритмы обработки данных. Навигационные камеры робота цветные, они получают изображения большего, нежели у «Кьюриосити», разрешения. Кроме того, колеса у ровера толще, чем у предшественника, и другой рисунок протекторов. Ученые считают, что колеса будут меньше повреждаться.
Одна из важнейших задач для марсохода: сбор и хранение образцов для возвращения на Землю. От успеха этой миссии зависит очень многое. И теперь, когда ровер начнет двигаться, вы будете понимать, что и как обеспечивает это движение.
Примечание: Эван Хильгеманн (Evan Hilgemann) — инженер-механик из Лаборатории реактивного движения НАСА (Jet Propulsion Laboratory или JPL).
Perseverance — наш маленький и важный друг
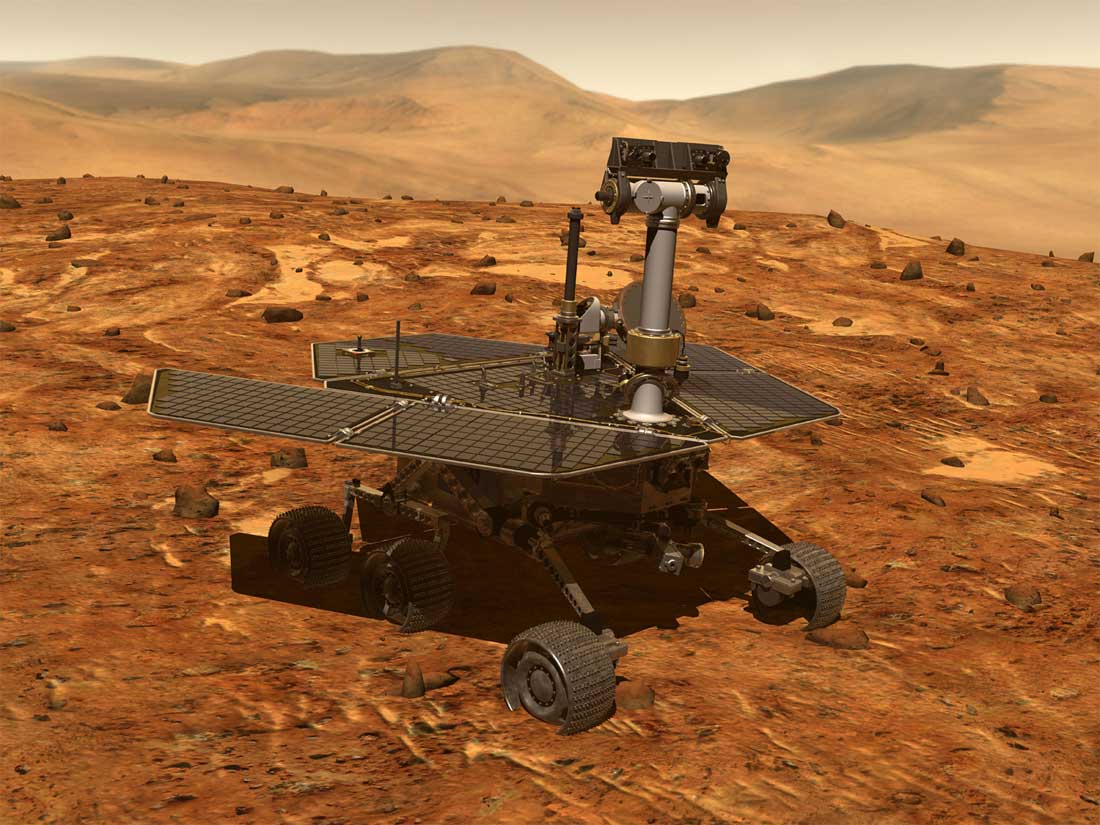 Так выглядел первый рабочий марсоход. В качестве источника питания были установлены солнечные панели.
Так выглядел первый рабочий марсоход. В качестве источника питания были установлены солнечные панели.
Запускать марсоходы человечество стало с прошлого века, первые попытки в этом предпринимал Советский Союз в начале 1970-х годов прошлого века и они были неудачными. Марсоход Марс-2 разбился при посадке, а Марс-3 потерял связь с Землёй через 14,5 секунд после выхода на поверхность. Зато американцы в этом деле преуспели.
В 1997 году NASA отправило к Красной планете марсоход Соджорнер, и с тех пор на ней побывало пять марсоходов. Последний из них (Perseverance, о котором все говорят) был запущен 30 июля 2020 года.
На этого малыша возложили серьёзнейшую задачу: доставить на Землю марсианский грунт. Случится это должно аж через 11 лет.
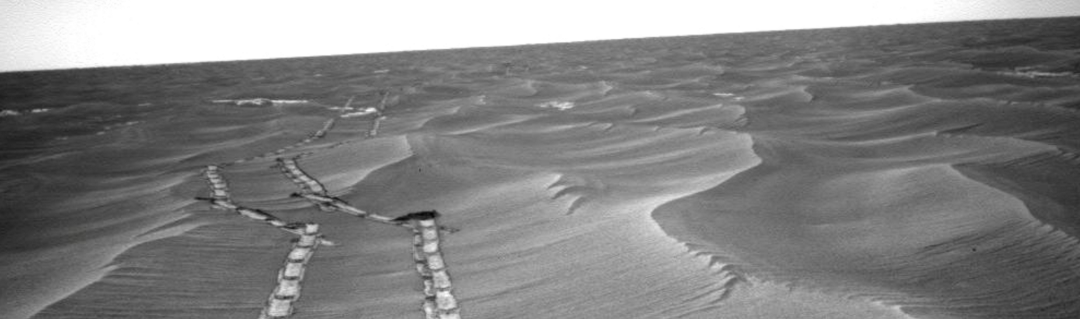
 Это первая панорама с нового марсохода.
Это первая панорама с нового марсохода.
На поверхность планеты марсоход прибыл 18 февраля 2021 года. Он уже успел даже доставить несколько уникальных снимков места, где ему предстоит обитать.
Чтобы вы понимали всю серьёзность, для исследования грунта прямо на поверхности, Perseverance оснастили семью различными датчиками для химического и фото анализа, роборукой и специальным герметичным пространством внутри для доставки на Землю полученных образцов.
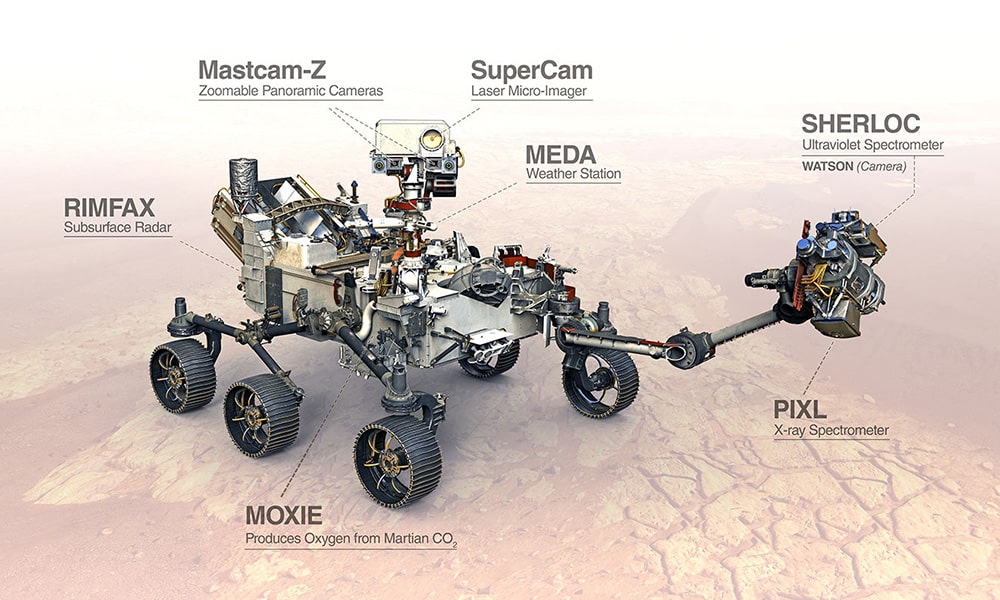 Схема с описанием всех датчиков нового марсохода из программы Марс-2020
Схема с описанием всех датчиков нового марсохода из программы Марс-2020
Например, при помощи датчика PIXL марсоход умеет проводить рентгенофлуоресцентную спектрометрию. Эта штука работает почти как обычный рентген. Она облучает грунт (вплоть до мелкодисперсных песчинок). Затем специальные сенсоры улавливают отражение от материалов, и полученная информация анализируется встроенным в компьютер алгоритмом. Результатом является список полного химического состава взятого образца.
Похожим образом работает датчик SHERLOC, только он определяет излучение в ультрафиолетовом диапазоне. Благодаря этому марсоход может определять наличие органических соединений в горных породах. Это то, что может указать на наличие жизни на Марсе —существующей или существовавшей.
НАСА опубликовало первую аудиозапись звуков с Марса, сделанную микрофоном марсохода Perseverance
Александр Родин, заведующий лабораторией беспилотных летательных аппаратов МФТИ:
1. Конечно, когда летом прошлого года принималось решение о переносе запуска “ЭкзоМарс” на 2022 год, было очень обидно. Пандемия – одна из причин, но на данное решение повлияла и недостаточная готовность проекта. Однако следует помнить, что проект “ЭкзоМарс” стартовал еще в 2016 году (орбитальный спутник – первая часть миссии, уже 6 лет работает на орбите Марса) и свои открытия он уже сделал. Именно российские ученые открыли в атмосфере планеты хлороводород и “закрыли” метан, концентрацию которого до этого “измерял” американский марсоход “Кьюриосити” (это очень важный вопрос, потому что метан один из маркеров жизни – Ред).
Споры о наличии или отсутствии метана в атмосфере Марса идут до сих пор, однако открытия российских ученых, основанные на данных разработанных ими спектрометров, обладающих уникальной чувствительностью, наделали немало шума в научных кругах и поставили под серьезное сомнение гипотезу о наличии на планете даже самых примитивных форм жизни. Также необходимо учитывать, что марсианский “забег” 2020 года происходит в очень разных весовых категориях. Если американцы планомерно переходят от чисто научных миссий к задачам освоения Марса (заметим, кстати, что это освоение происходит без участия человека, зато предполагает сетевое взаимодействие различных роботизированных платформ), то для Китая и Эмиратов важно участие в “марсианской гонке” как таковое.
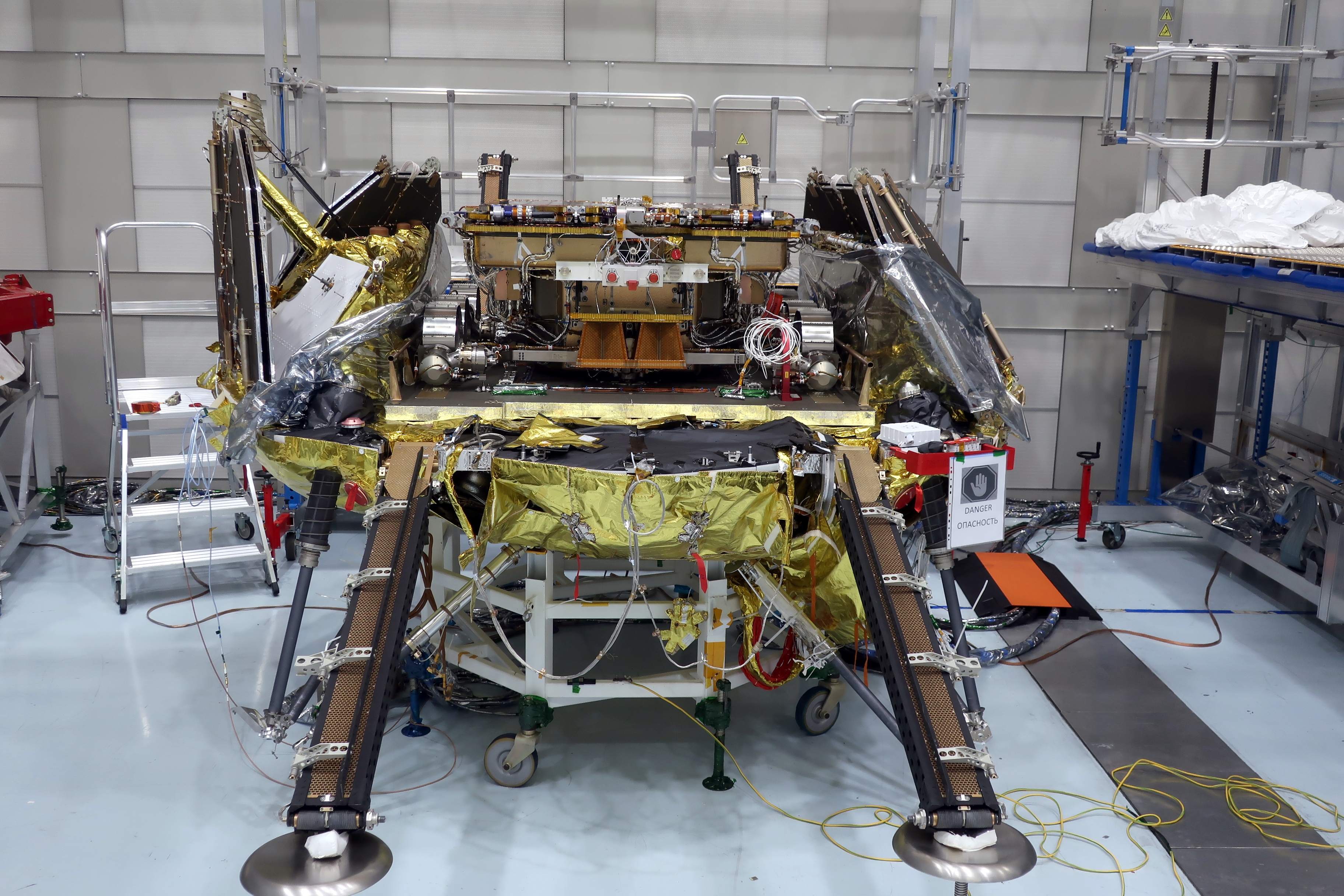
Если говорить о второй очереди миссии “ЭкзоМарс” – марсоходе “Розалинд Франклин” и посадочной платформе “Казачок” – то за научную программу этой миссии беспокоиться не стоит. Европейский марсоход – пока единственный, оснащенный буровой установкой, способной производить анализ марсианских пород на глубине до 2 метров. “Казачок” несет довольно сложный комплекс научной аппаратуры, включающий 11 приборов, предназначенных в основном для исследований атмосферы и климата планеты. Эти данные очень пригодятся, как для анализа наблюдений орбитального аппарата “ЭкзоМарс”, так и для интерпретации данных китайской, арабской и американской миссий. Все-таки времена “большого спорта” в космических исследованиях прошли, сегодня международная конкуренция принимает более сложные формы и нередко маскируется под “равноправное” сотрудничество.
2. Американский марсоход, непроизносимое название которого в русской культуре звучало бы как “Настойчивый”, до запуска имел рабочее название MSL – Марсианская научная лаборатория. Тем не менее, его задачи выходят далеко за пределы чисто научных исследований. Так, наряду с аппаратурой для анализа минералогического и элементного состава марсианской породы и ставшими уже традиционными экспериментами по поиску следов биологической активности, марсоход оснащен аппаратурой для добычи кислорода из марсианской атмосферы. Наиболее интересной особенностью марсохода, на мой взгляд, станет новая функция складирования образцов марсианских пород, которые будут проанализированы или доставлены на Землю в будущем другими аппаратами. Таким образом, впервые в истории освоения дальнего космоса реализуется сетевое взаимодействие автоматических аппаратов между собой. Все это свидетельствует о том, что человек на Марсе лишний, роботы справятся со всеми поставленными задачами намного лучше.

Почему так сложно долететь до Марса?
Несмотря на многочисленные программы по изучению Марса, которые проводятся уже более 60 лет, полет на планету остается опасным, сложным и непредсказуемым. Почему?
- Одним из самых критичных этапов является запуск. До сих пор возникают проблемы с выходом за околоземную орбиту. В 2012 году у российской межпланетной станции «Фобос-Грунт» отказал бортовой компьютер, и аппарат сгорел в атмосфере, не выйдя за пределы Земли;
- Другая проблема — составление траектории полета. Расстояние между Землей и Марсом — 55 млн км, и современные космические аппараты вполне могут его преодолеть. Однако из-за разной скорости и траектории движения планет на пути реальная дистанция может достигать 450 млн км, а иногда и больше. При этом во время полета курс тоже может корректироваться. Если что-то пойдет не так, аппарат может улететь совсем в другую сторону или вовсе исчезнуть в космосе. Так произошло с японским космическим аппаратом «Нодзоми», отправленным в 1998 году. Ему не хватило мощности, чтобы сразу долететь до Марса, поэтому пришлось сделать несколько гравитационных маневров. По прошествии пяти лет, в 2003 году, «Нодзоми» прошел на высоте 1000 км от Марса, не выйдя на его орбиту;
- Если выйти на орбиту удалось, это еще не значит, что посадка пройдет успешно. Из-за большой задержки радиосигналов во времени — около 12 минут — дистанционное управление посадкой будет недоступно. Это значит, что необходим автономный бортовой компьютер, который «приземлит» аппарат самостоятельно. Посадка, как правило, занимает шесть-семь минут: их называют «семь минут ужаса», потому что именно в этот момент крушение ровера может привести к провалу всей миссии.
При приземлении марсохода Curiosity использовалась новая технология посадки, так называемый «Небесный кран», который за счет реактивных двигателей мягко опускает аппарат на поверхность планеты.
- Что касается высадки людей на Марсе, то тут проблем еще больше. Во-первых, время в пути составляет около девяти месяцев только в одну сторону. Это значит, что космонавтам придется сидеть в замкнутом пространстве без гравитации с прерывающейся связью с Землей. Для этого нужна особая физическая и психологическая подготовка. Во-вторых, пока нет достаточно мощной ракеты, чтобы отправить на Марс хотя бы одного человека. В-третьих, на «красной планете» высокий уровень радиации, который может привести к болезни Паркинсона, онкологическим заболеваниям, кратковременной потери памяти и прочим болезням. Авторы книги «Пилотируемая экспедиция на Марс» приводят следующий список недугов, которые могут возникнуть у космонавтов в процессе полета и по приземлении: космическая болезнь движения, заложенность носовых пазух, запоры, головная боль, раздражение кожи и ее сухость, абсцессы, небольшие ссадины и ушибы, воспаление роговицы или ее ссадины, инфекция верхних дыхательных путей, бессонница, отит.
NASA уже разрабатывает специальные костюмы, которые обеспечивают атмосферное давление не воздухом, как раньше, а сдавливанием кожи материалами, плотно прилегающими к телу. Такие скафандры весят вдвое меньше обычных и обладают высокой мобильностью.
В декабре 2020-го на вручении премии Axel Springer Award, которая присуждается выдающимся инноваторам, Илон Маск заявил, что через шесть лет у людей появится возможность высадиться на Марсе.
Кроме Илона Маска о колонизации Марса мечтает и NASA. В 2015 году агентство представило программу путешествия на «красную планету». Ее итогом должна стать высадка первого человека на Марс в 2030-х годах. Однако до этого предстоит проделать много работы: изучить поверхность Марса, разработать специальные костюмы, спроектировать ракеты и станции, в которых будет возможна безопасная посадка и многое другое.













